
วันอาทิตย์ที่ 13 กันยายน พ.ศ. 2558
วันอาทิตย์ที่ 28 มิถุนายน พ.ศ. 2558
โถฉี่ประหยัดน้ำ ล้างมือปุ๊บ เติมน้ำปั๊บ ลดการใช้น้ำได้อีกต่อ
โถฉี่ประหยัดน้ำ
ล้างมือปุ๊บ เติมน้ำปั๊บ ลดการใช้น้ำได้อีกต่อ

หลังจากการเข้าห้องน้ำทำธุระส่วนตัวเสร็จเรียบร้อยแล้ว
ขั้นตอนต่อไปคือล้างมือให้สะอาดทุกครั้ง
เพราะเราไม่รู้ว่ามือเราไปสัมผัสจับอะไรมาบ้าง
(แต่ก็มีบางคนที่ไม่ชอบล้างมือหลังเข้าห้องน้ำเหมือนกันนะ)
โดยปกติแล้วน้ำที่ใช้ล้างมือจะเป็นคนละส่วนกับน้ำที่ใช้กดทิ้งของเสีย
และมันก็จะถูกทิ้งลงท่อระบายน้ำอย่างเปล่าประโยชน์
ลองคิดดูว่าจะดีแค่ไหนถ้าเราใช้น้ำหลังจากการล้างมือมาเป็นน้ำสำหรับการกดทิ้งของเสียครั้งต่อไป

มารู้จักกับโถปัสสาวะชายที่ออกแบบมาเพื่อประหยัดการใช้น้ำให้กับโลกกันดีกว่า
ผลิตภัณฑ์ที่ว่านี้เป็นไอเดียของดีไซเนอร์สุดคูลจาก Latvia
ชื่อว่า Kaspars Jursons โดยวิธีการทำงานของมันก็คือ
เมื่อเหล่าบรรดาสุภาพบุรุษทำธุระปลดทุกข์เสร็จเรียบร้อยแล้ว
จะมีก๊อกน้ำด้านบนใช้ล้างมือเชื่อมกับที่เก็บน้ำของโถปัสสาวะ พอล้างมือปุ๊ป
น้ำที่ใช้ล้างมือก็จะเติมและเก็บลงไปในโถปัสสาวะปั๊บ
เพื่อใช้กดชำระล้างของเสียอีกทีโดยที่ไม่ทิ้งให้สูญเปล่า
ถือเป็นการประหยัดน้ำได้อีกต่อ
ปกติแล้วโถสุขภัณฑ์ส่วนใหญ่จะใช้น้ำในการการกดเพื่อทิ้งของเสียประมาณ 3-6 ลิตร การใช้น้ำจากการล้างมือมาช่วยเติมเพื่อกดครั้งต่อไปก็ถือเป็นไอเดียที่ดีมากและควรสนับสนุนให้ทำเป็นอย่างยิ่ง

เมื่อไหร่บ้านเราจะมีเข้ามาขายกับเขาสักที
เอาเป็นว่าระหว่างรอผลิตภัณฑ์ตัวนี้เข้ามา ใครอยากจะประหยัดน้ำที่ใช้ในการกด
(โถสุขภัณฑ์แบบธรรมดา) ลองเอาขวดน้ำพลาสติกที่ใช้แล้วขนาดพอเหมาะ เติมน้ำให้เต็มแล้วใส่ลงไปในตัวที่เก็บน้ำของชักโครกแบบกด
ก็ช่วยประหยัดน้ำได้เหมือนกัน แต่ข้อควรระวังคือต้องใช้ขวดที่มีขนาดพอดี
ทดสอบด้วยการกดแล้วก็ยังสะอาดอยู่ อย่าประหยัดจนเกินไปกดแล้วยังมีร่องรอยอยู่



Display Block
Display Block
เราสามารถใช้ Display
Block เพื่อแสดงภาพ เขียนข้อความ หรือวาดรูปบนหน้าจอแสดงผลของ NXT
การนำ Display Block หลายๆ อันมาต่อกันทำให้วาดรูปได้หลากหลาย
หน้าตาของ Display Block

1.สัญลักษณ์โหมดการวาด
ว่าเป็นการแสดงรูปภาพ เขียนตัวอักษร หรือวาดภาพ
2.Data Hub เพื่อนำค่าจากบล๊อกอื่นมาใช้
การตั้งค่า Display Block

1.Action - เราสามารถเลือกได้ว่าจะให้
-Image : วาดภาพลงบนหน้าจอ
-Text : วาดข้อความบนหน้าจอ
-Drawing : วาดรูปร่างลงบนหน้าจอ
-Reset : ลบรูปที่วาดไปแล้ว
2.Clear - เลือกว่าก่อนวาด
ให้ลบรูปบนหน้าจอหรือไม่
-หากเลือกไว้
รูปที่อยู่บนหน้าจอจะถูกลบออกก่อนที่จะวาดรูปใหม่
-หากไม่ได้เลือก
จะเป็นการวาดรูปทับของเดิมที่มีอยู่บนหน้าจอ
-หากตั้งตรง Action = Image จะพบกับตัวเลือกอื่นๆ อีก
3.File - เลือกรูปที่จะแสดง
4.Position - ปรับตำแหน่งของรูป

หากตั้งตรง Action
= Text จะพบกับตัวเลือกเพิ่มเติมต่อไปนี้
6.Text - พิมพ์ข้อความที่ต้องการให้หุ่นยนต์แสดงผล
7.Position - ปรับตำแหน่งของข้อความ

หากตั้งตรง Action
= Drawing จะพบกับตัวเลือกเพิ่มเติมต่อไปนี้
8.Type - เลือกชนิดการวาดรูป
-Point - วาดจุดลงบนหน้าจอ
-Line - วาดเส้นลงบนหน้าจอ
-Circle - วาดวงกลมลงบนหน้าจอ
9.Position - ปรับตำแหน่งของรูปวาด
หากเลือกเป็นวงกลมสามารถปรับรัศมีได้
Wait Block
Wait Block ทำให้หุ่นยนต์รอจนอุปกรณ์ตรวจจับ
สามารถจับค่าที่ต้องการได้ แล้วถึงค่อยดำเนินการต่อ หรือหยุดเป็นระยะเวลาหนึ่ง
หน้าตาของ Wait Block

1.ตัวเลขแสดงพอร์ตที่ใช้กับบล๊อกนี้
2.สัญลักษณ์แสดงชนิดของการรอ
Wait For Time

หากตั้ง Control = Time จะทำให้หุ่นยนต์หน่วงเวลาเป็นระยะเวลาหนึ่ง
1.Until - ระยะเวลาที่ให้หุ่นยนต์หน่วง
หน่วยเป็นวินาที
Wait For Touch

หากตั้ง Control = Sensor,
Sensor = Touch Sensor จะทำให้หุ่นยนต์รอการกดปุ่ม
1.Port - เลือกพอร์ตของเซ็นเซอร์
2.Action
-Pressed - รอจนปุ่มถูกกด
-Released - รอจนปุ่มถูกปล่อย
-Bumped - รอจนปุ่มถูกกดแล้วถูกปล่อย
3.หากต่อ NXT กับคอมพิวเตอร์อยู่
กล่องนี้จะแสดงสถานะการกดปุ่ม
Wait For Sound

หากตั้ง Control = Sensor,
Sensor = Sound Sensor จะทำให้หุ่นยนต์รอถึงความดังของเสียง
1.Port - เลือกพอร์ตของเซ็นเซอร์
2.Until - รอจนกว่าความดังจะอยู่ในช่วงที่กำหนด
3.หากต่อ NXT กับคอมพิวเตอร์อยู่
กล่องนี้จะแสดงความดังของเสียงที่เซ็นเซอร์สามารถตรวจจับได้
Wait For Light

หากตั้ง Control = Sensor,
Sensor = Light Sensor จะทำให้หุ่นยนต์รอถึงความสว่าง
1.Port - เลือกพอร์ตของเซ็นเซอร์
2.Until - รอจนกว่าเซ็นเซอร์จะตรวจพบความสว่างอยู่ในช่วงที่กำหนด
3.Function
-Generate Light - หากทำเครื่องหมายไว้
จะมีแสงสีแดงออกจากเซ็นเซอร์แสงระหว่างรอ
4.หากต่อ NXT กับคอมพิวเตอร์อยู่
กล่องนี้จะแสดงความสว่างของแสงที่เซ็นเซอร์สามารถตรวจจับได้
Wait For Distance

หากตั้ง Control = Sensor,
Sensor = Ultrasonic Sensor จะทำให้หุ่นยนต์รอจนกว่าจะตรวจพบสิ่งของในระยะทางที่กำหนด
1.Port - เลือกพอร์ตของเซ็นเซอร์
2.Until - รอจนกว่าเซ็นเซอร์จะตรวจพบวัตถุในระยะทางที่กำหนด
3.Show - เลือกหน่วยที่ต้องการวัด
4.หากต่อ NXT กับคอมพิวเตอร์อยู่
กล่องนี้จะแสดงค่าที่ Ultrasonic Sensor อ่านได้
Wait For NXT Button

หากตั้ง Control = Sensor,
Sensor = NXT Buttons รอการกดปุ่มบน NXT
1.Button - เลือกปุ่มที่จะรอให้กด
2.Action
-Pressed - รอจนปุ่มถูกกด
-Released - รอจนปุ่มถูกปล่อย
-Bumped - รอจนปุ่มถูกกดแล้วถูกปล่อย

โปรแกรมแรกของฉัน



โปรแกรมแรกของฉัน
เมื่อเรารู้จักโปรแกรม NXT
แล้ว ก็ถึงเวลาลองสร้างโปรแกรมง่ายๆ ดู
โดยเราจะสร้างโปรแกรมที่ทำให้หุ่นยนต์ NXT ส่งเสียงออกมา
ขั้นตอนแรก เราต้องสร้างโปรแกรมใหม่ก่อน
เมื่อเราเปิดโปรแกรม NXT แล้วจะพบกับหน้าแบบนี้

ให้เราตั้งชื่อของโปรแกรมในส่วนของ Start
New Program แล้วกด Go >> ดังรูป

เราจะได้โปรแกรมใหม่ขึ้นมาดังรูป
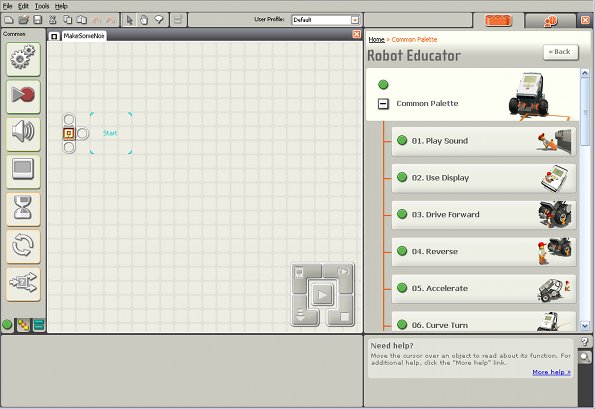
เมื่อเราสร้างโปรแกรมใหม่ขึ้นมา
ตรงกลางหน้าจอที่เราเห็น ก็คือพื้นที่ทำงาน หรือ Work
Area เป็นที่ที่เราสามารถลากบล๊อกจากด้านซ้ายมาใส่ในโปรแกรม
ทำให้หุ่นยนต์ส่งเสียง
ต่อไปเราจะลองสร้า้งโปรแกรมง่าย ๆ
โดยการลากบล๊อกมาเพื่อสร้างโปรแกรม การลากบล๊อกคือการกดเมาส์ค้างไว้แล้วทำการ
ลากมาวาง การทำให้หุ่นยนต์ส่งเสียง ให้ลากบล๊อกเสียง (Sound
Block) มาต่อจากบล๊อก Start

พอลากมาเสร็จแล้ว สามารถเลือกเสียงได้ว่าจะให้มันส่งเสียงอย่างไร โดยตั้งค่าตรงด้านล่าง (Configuration Panel) เลือกเสียงที่ต้องการในกล่อง
File

รู้จักกับบล๊อกพื้นฐานชนิดต่างๆ
ส่วนที่เราใช้เขียนคำสั่ง
ให้หุ่นยนต์ทำหน้าที่ตามที่เราต้อง คำสั่งนั้นจะอยู่ในรูปแบบที่เรียกว่า บล๊อก(ฺBlock)
ซึ่งเราจะนำเรียงต่อกัน บล๊อกแต่ละตัวจะทำหน้าที่แตกต่างกันไป
ตามที่เรากำหนดค่า บล๊อกพื้นฐาน จะมีดังนี้

|
Move Block ใช้สำหรับหมุนมอเตอร์
ทำให้หุ่นยนต์เคลื่อนที่ไปข้างหน้าหรือถอยหลัง เป็นเส้นตรงหรือเลี้ยวได้

|














สมัครสมาชิก:
ความคิดเห็น (Atom)